
CC BY 4.0 (除特别声明或转载文章外)
如果这篇博客帮助到你,可以请我喝一杯咖啡~
订阅者Subscriber的编程实现
创建订阅者代码C++
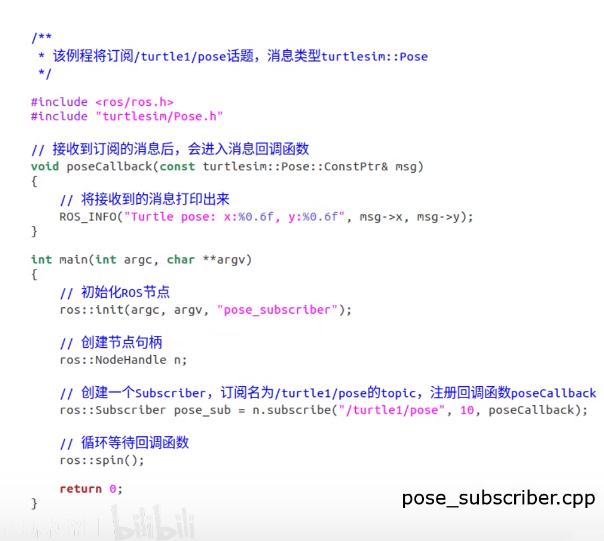
- 如何实现一个订阅者
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理
配置订阅者代码编译规则
如何配置CMakeLists.txt中的编译规则
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
add_executable(pose_subscriber/pose_subscriber.cpp) target_link_libraries(pose_subscriber ${catkin_LIBRARIES})编译并运行订阅者
cd ~/catkin_ws catkin_make source devel/setup.bash roscore rosrun turtlesim turtlesim_node rosrun learning_topic pose_subscriber