
CC BY 4.0 (除特别声明或转载文章外)
如果这篇博客帮助到你,可以请我喝一杯咖啡~
创建工作空间与功能包
工作空间
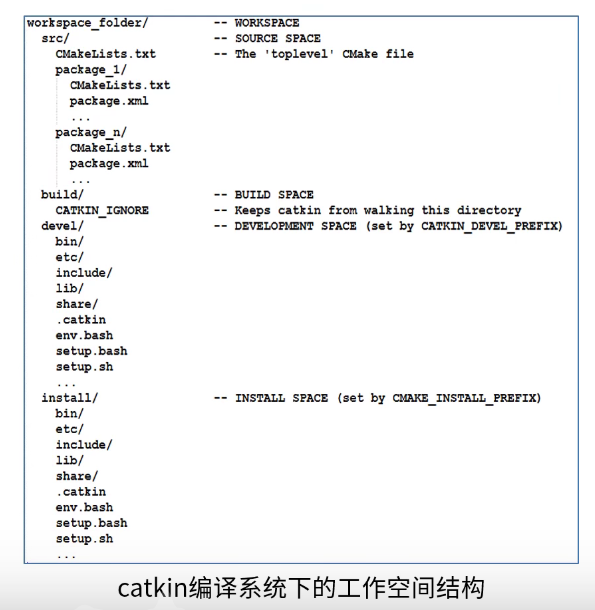
- workspace
- src: 代码空间(Source Space)
- build: 编译空间(Build Space)
- devel: 开发空间(Development Space)
- install : 安装空间(Install Space)
创建工作空间
创建>编译>设置环境变量>检查环境变量
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
echo $ROS_PACKAGE_PATH
创建功能包
创建功能包>编译功能包 放置ROS里面源码的最小单元
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs rospy roscpp
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
catkin_create_pkg 包名 依赖1 依赖2…
同一个工作空间下,不允许存在同名的功能包 不同的工作空间下则可以